
Hier unten ist es nass, dunkel und es herrscht ein höherer Druck als an Land. Manche mögen das ungemütlich finden, ich jedoch bin voll in meinem Element! Wenn ich mich vorstellen darf: Mein Name ist VIATOR, der Reisende. Wohin ich reise? Nun, das hängt ganz davon ab, wo die Wissenschaftler mich hinbeordern. Ich bin noch nicht so alt, deshalb muss ich noch beweisen, was ich schon kann. Aber meine Aufgaben werden schwieriger und ich bin gespannt, was die Zukunft für mich bereithält. Aber ich erzähle euch, liebe Oceanblogs-Leser, meine Reise gerne von Anfang an.
Mit wem ihr es hier zu tun habt:
Ich bin ein sogenannter Crawler, also ein Kettenfahrzeug. Das besondere an mir ist, dass ich Daten für die Wissenschaft am Meeresboden sammeln kann. Später soll ich in bis zu 6.000 Metern Tiefe arbeiten, bislang sind es aber erst 20 Meter gewesen. Wissenschaftliche Missionen habe ich leider noch nicht durchgeführt, denn es werden erst noch einige Tests mit mir gemacht. Es soll ja schließlich alles perfekt funktionieren, wenn es dann auf große Expedition geht. Und schließlich fängt jedes Kettenfahrzeug mal klein an.
Was für autonome Geräte der Ozeanforschung wie mich besonders wichtig ist, ist die Navigation. Die Forscher müssen sich darauf verlassen können, dass ich mich auch auf unbekanntem Boden nicht verfahre. Mein Bezugspunkt ist dabei immer meine Garage MANSIO, zu der ich stets zurückkehre. Mansio bedeutet übrigens Herberge.
Auf einer Forschungsmission habe ich dann zwei Hauptaufgaben: Zum einen messe ich die Konzentrationen bestimmter Stoffe, wie zum Beispiel den Sauerstoffgehalt, den pH-Wert und viele andere, in der bodennahen Wassersäule. Gleichzeitig erzeuge ich aber auch eine Karte des Meeresbodens in Millimeterauflösung. Dafür benutze ich meine Kamera (mit der ich Bilder aufnehme) und meinen Laser (der erstellt die 3D-Informationen). Im Moment fahre ich Missionen von acht bis zehn Kilometern Länge in einer Geschwindigkeit von maximal zehn Zentimetern pro Sekunde. Mein Vorteil gegenüber anderen Ozeanforschungsgeräten ist, dass ich direkt am Boden arbeiten und sogar stehen bleiben kann.
Navigation unter Wasser
Um unter Wasser, das zuweilen auch recht trüb sein kann, und auf unebenem Boden vernünftig navigieren zu können, werden verschiedene Techniken miteinander verknüpft. Die arbeiten mittlerweile so gut zusammen, dass die Fehler in meinen Berechnungen bei fünf bis zehn Zentimetern liegen – das ist schon ziemlich genau.
1. Radodometerie
Hierbei werden die Umdrehungen der Ketten gezählt und daraus berechnet, wie weit ich schon gefahren bin. Das funktioniert aber nur auf geeignetem Boden. Wenn ich beispielsweise ins Rutschen komme, lege ich zwar eine Strecke zurück, die jedoch nicht gezählt werden kann, weil sich die Ketten selbst nicht bewegen. Andersherum: Wenn ich vor einen Stein fahren sollte, drehen sich die Ketten zwar weiter, ich komme aber keinen Zentimeter voran.
2. Visuelle Odometrie
Dabei werden Kamerabilder, die ich erstelle, mit den Berechnungen aus der Radodometrie kombiniert. Auch hier hängt die Genauigkeit mit der Beschaffenheit des Bodens ab, über den ich fahre.
3. Ultra Short Baseline System (USBL)
Dies ist ein akustisches Verfahren. Sowohl ich als auch MANSIO sind jeweils mit Lautsprechern und Mikrofonen ausgestattet. Jeder von uns kann demnach „rufen“ und „hören“. So können wir miteinander kommunizieren. Es kann berechnet werden, wie lange die Laufzeit ist, also wie lange ein Signal braucht, um anzukommen. So kann die Distanz berechnet werden. Dadurch, dass wir jeweils vier Antennen haben, die in die vier verschiedenen Richtungen angeordnet sind, können wir auch die Richtung erkennen, aus der das Signal des anderen kommt.
-
- Navigationsübungen des VIATORS und seiner Garage im Testbecken des DFKI in Bremen. Foto: Christian Howe
-

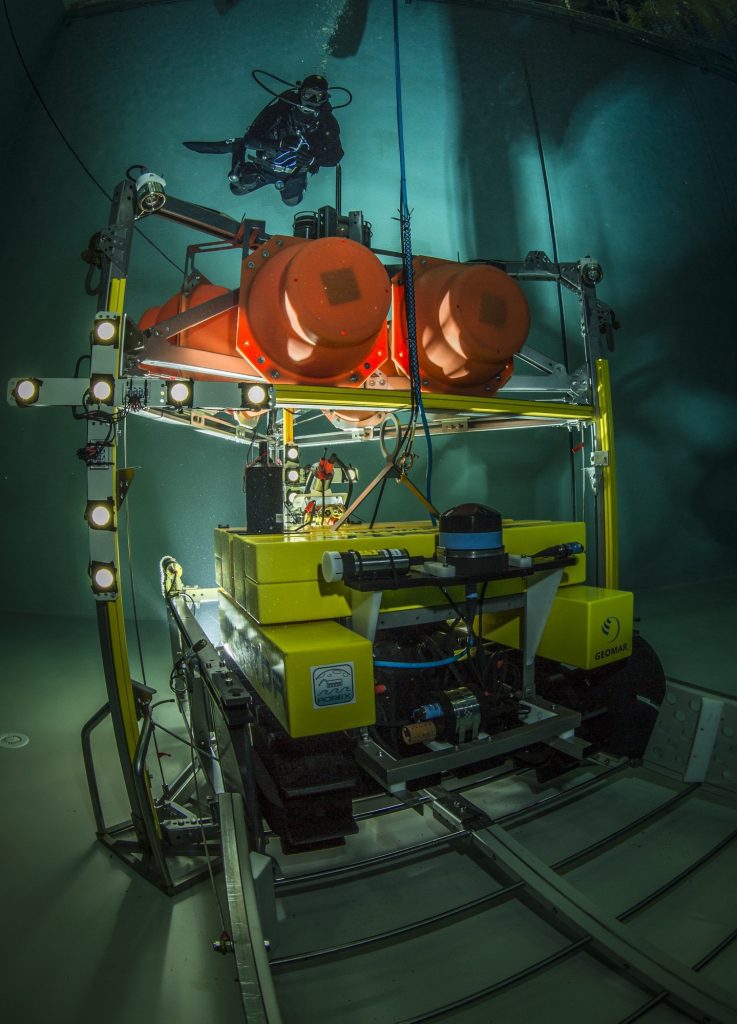
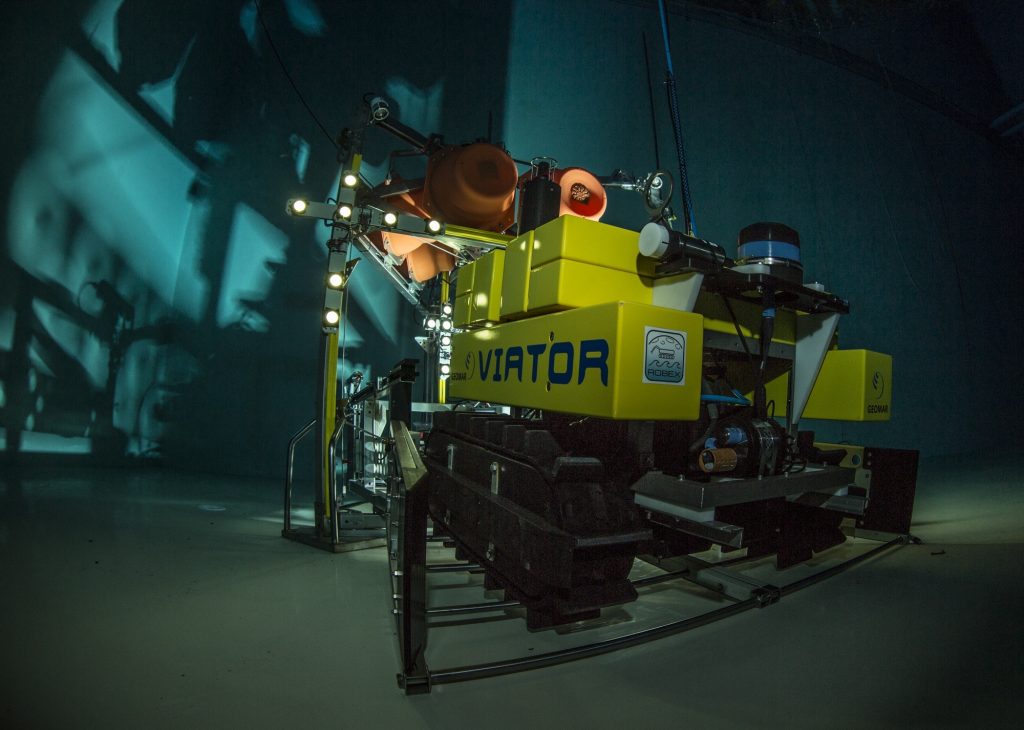
- Navigationsübungen des VIATORS und seiner Garage im Testbecken des DFKI in Bremen. Foto: Christian Howe
-

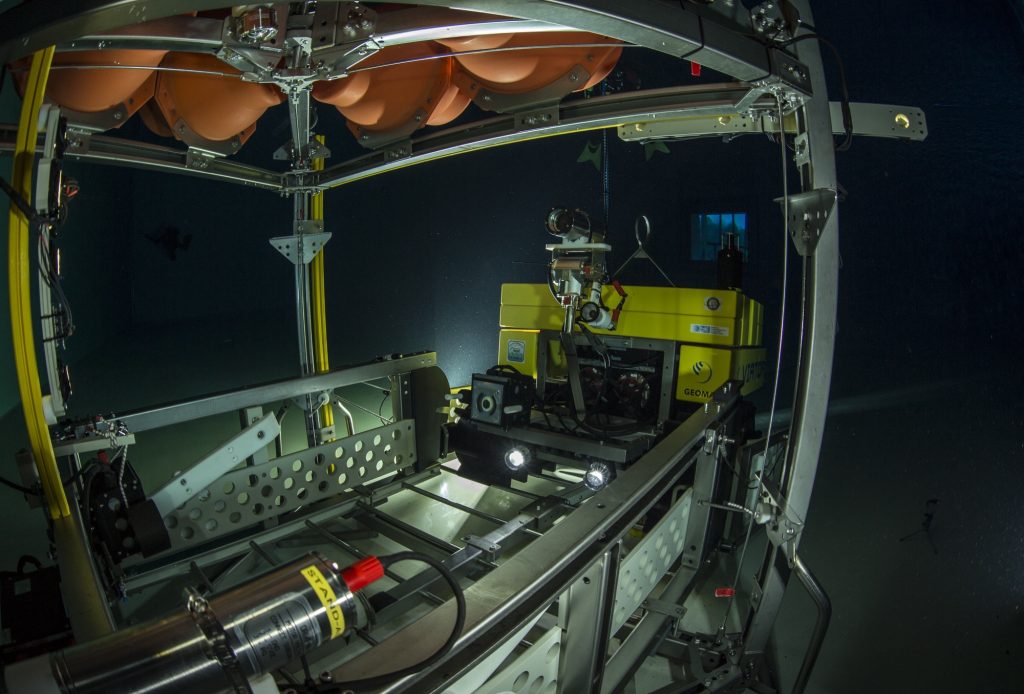
- Einfahrt des VIATORS in die Garage. Foto: Christian Howe
Einparken am Meeresboden
Wenn ich dann in einem Radius von 50 Zentimetern um MANSIO angekommen bin, kommt es nur noch darauf an, dass ich exakt einparke. Wie bei herkömmlichen Garagen auch, kann ich nur von einer Seite einfahren.
4. LED-Marker
Am MANSIO sind drei Kreuze mit jeweils sieben LED-Lampen angebracht. Diese Lampen dienen als Marker, die codiert sind. Sie leuchten, so dass ich sie auch in trübem Wasser sehe. Die Marker sind in so speziellen Abständen angebracht, dass im Endeffekt jedes Markerkreuz seine eigene ID hat und ich genau weiß, wer mich gerade anleuchtet.
In der Garage angekommen kann ich dort mittels induktiver Energieübertragung (also ohne direkten Kontakt) meinen Akku aufladen. Später soll ich so auch Daten an MANSIO übertragen können, der diese dann an ein Forschungsschiff oder gar einen Satelliten weiterleitet. Das ist im Moment aber noch Zukunftsmusik. Erstmal ein Schritt… äh, eine Kettenumdrehung nach der anderen!
Dann fahre ich immer wieder auf Mission und zurück in die Garage, um alle relevanten Daten für die Beantwortung der wissenschaftlichen Fragestellung zu sammeln.
Auftauchen, bitte!
Ist mein Auftrag dann nach bis zu drei Monaten erledigt, löst ein Hydrophon (eine Art „Unterwasserlautsprecher “) vom Forschungsschiff aus, ein Signal aus, der Releaser am MANSIO wird angesprochen und lässt das 450 Kilogramm schwere Gewicht ab, dass MANSIO am Boden gehalten hat. Dann treiben wir gemeinsam – zugegebener Maßen mit einem halben Meter pro Sekunde recht langsam – nach oben an die Wasseroberfläche.
Ein spannendes neues Jahr
Das Jahr 2017 wird für mich nun ziemlich aufregend: Ende Februar darf ich beim finalen Gerätetest auf einer Fahrt mit dem Forschungsschiff ALKOR in der Geltinger Bucht (in der äußeren Flensburger Förde) noch einmal zeigen, dass meine Technik funktioniert und sich die Wissenschaftler auf mich verlassen können. Das ist sozusagen die Generalprobe.
Richtig spannend wird dann es dann bei meiner offiziellen Demomission: Im Juli werde ich für den Transport nach Tromsø eingepackt, wo ich vom 22. August bis zum 09. September westlich Spitzbergen auf der POLARSTERN-Expedition PS108 vor den Augen der Welt zeige, was ich so alles draufhabe!
Ich werde euch, liebe Leser, natürlich gerne weiter auf dem Laufenden halten!
Bis dahin nasse Grüße,
Euer VIATOR
PS:. Ich wurde übrigens im Rahmen der ROBEX-Allianz der Helmholtz-Gemeinschaft entwickelt und getestet. Dazu gehört natürlich das GEOMAR, aber auch das Deutsche Forschungszentrum für Künstliche Intelligenz, das Deutsche Zentrum für Luft- und Raumfahrt sowie Airbus DS. Und ich habe drei „Geschwister“, die ähnlich funktionieren wie ich: Wally und Wally-II von der Jacobs University Bremen und Tramper vom Alfred-Wegener-Institut.
PPS: Auch wenn ich schon ziemlich viel unter Wasser kann, meine Fähigkeiten reichen leider nicht so weit, dass ich einen Blogbeitrag tippen kann. Das hat Gesa Seidel für mich übernommen. Dafür hat sie mit Dr. Sascha Flögel vom GEOMAR gesprochen. Vielen Dank dafür!